

 联系我们
联系我们

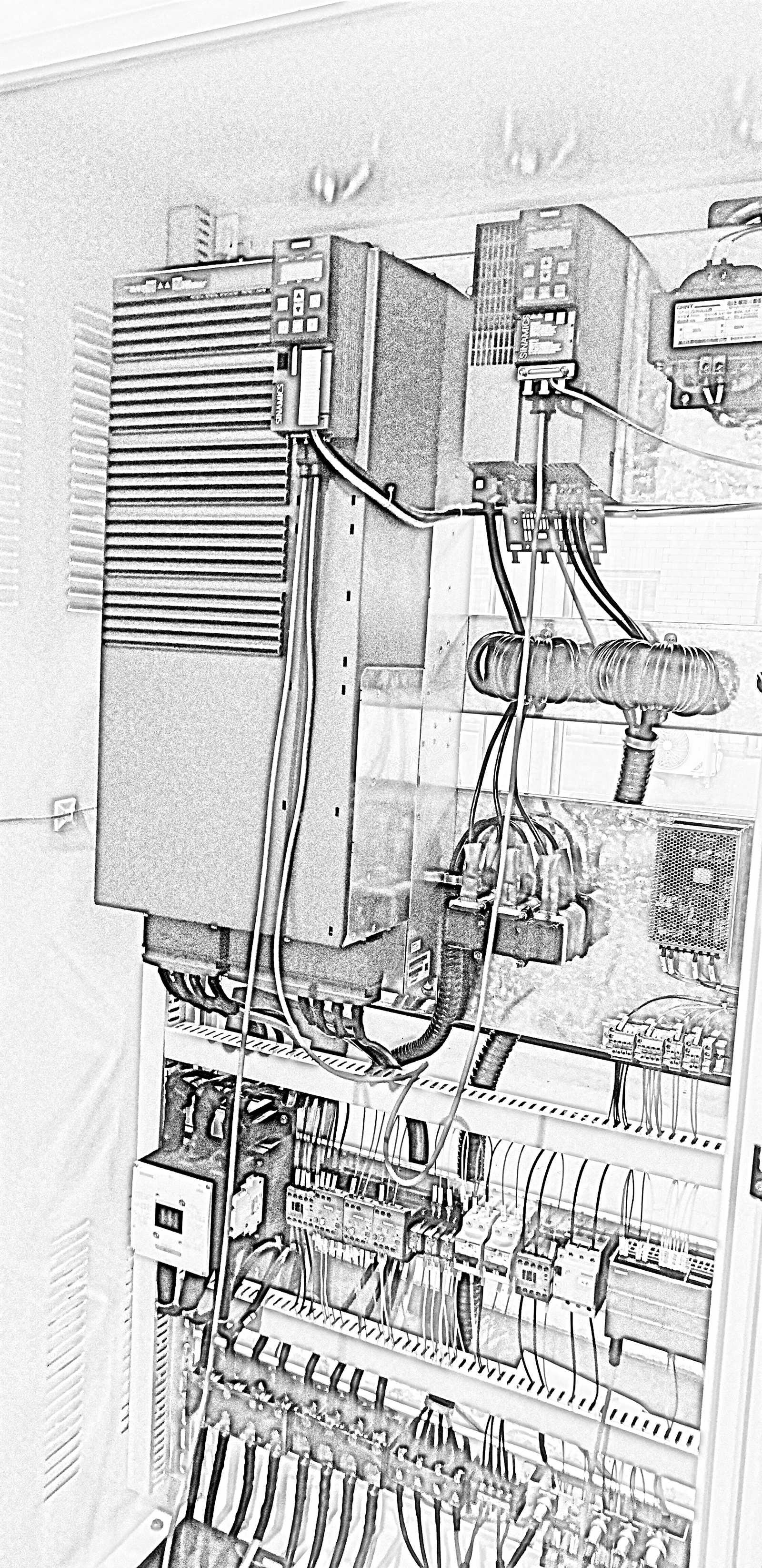
控制系统如上图示。大的装置是PM250加CU250S-2PN;小的装置是G120C。前者控制一个75kW的交流异步电机,作为动力测试主机。也就是测功机。后者是控制一个18.5kW的风机。针对试验台受试动力机的冷却。

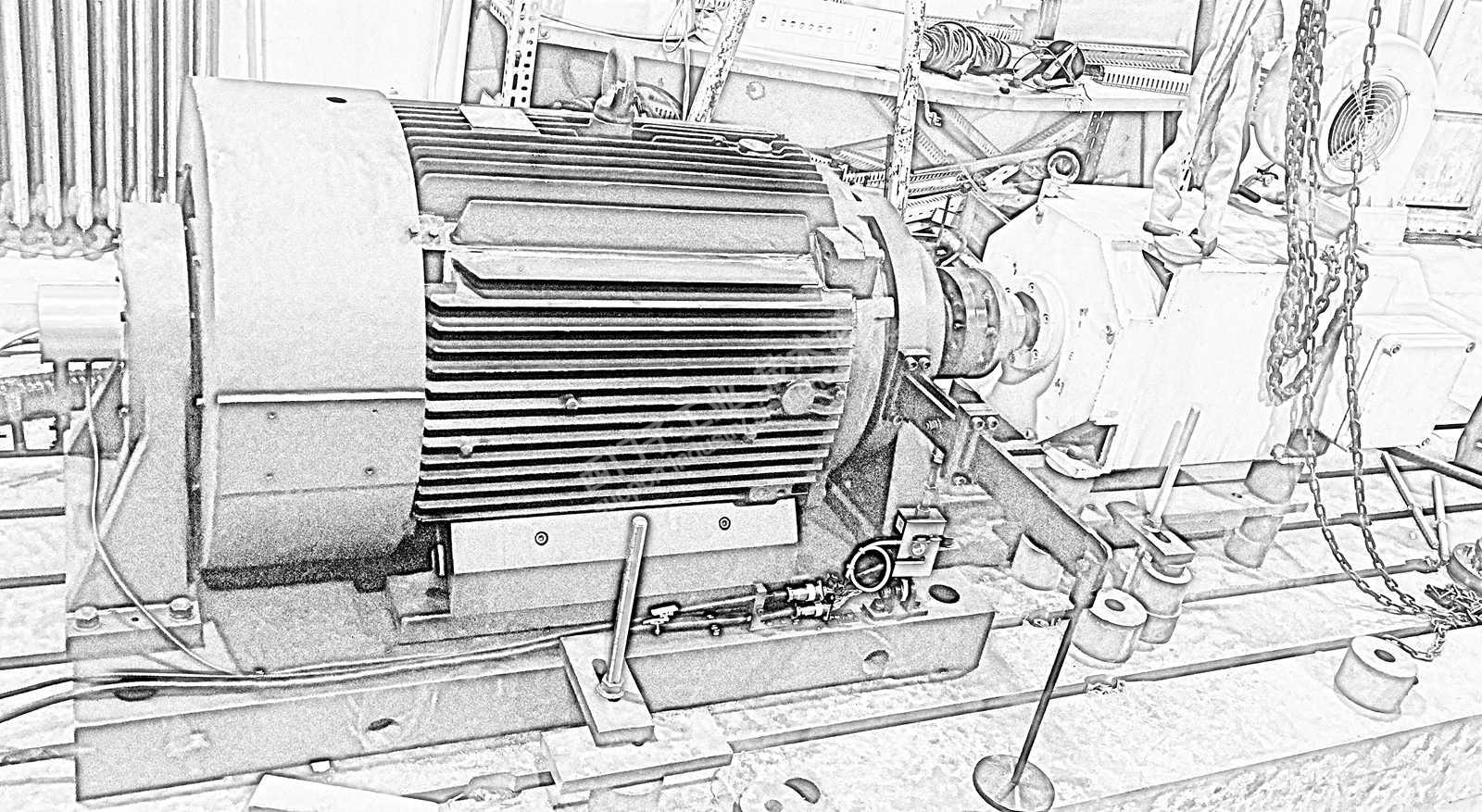
这是75kW测功机的台架。如上图示
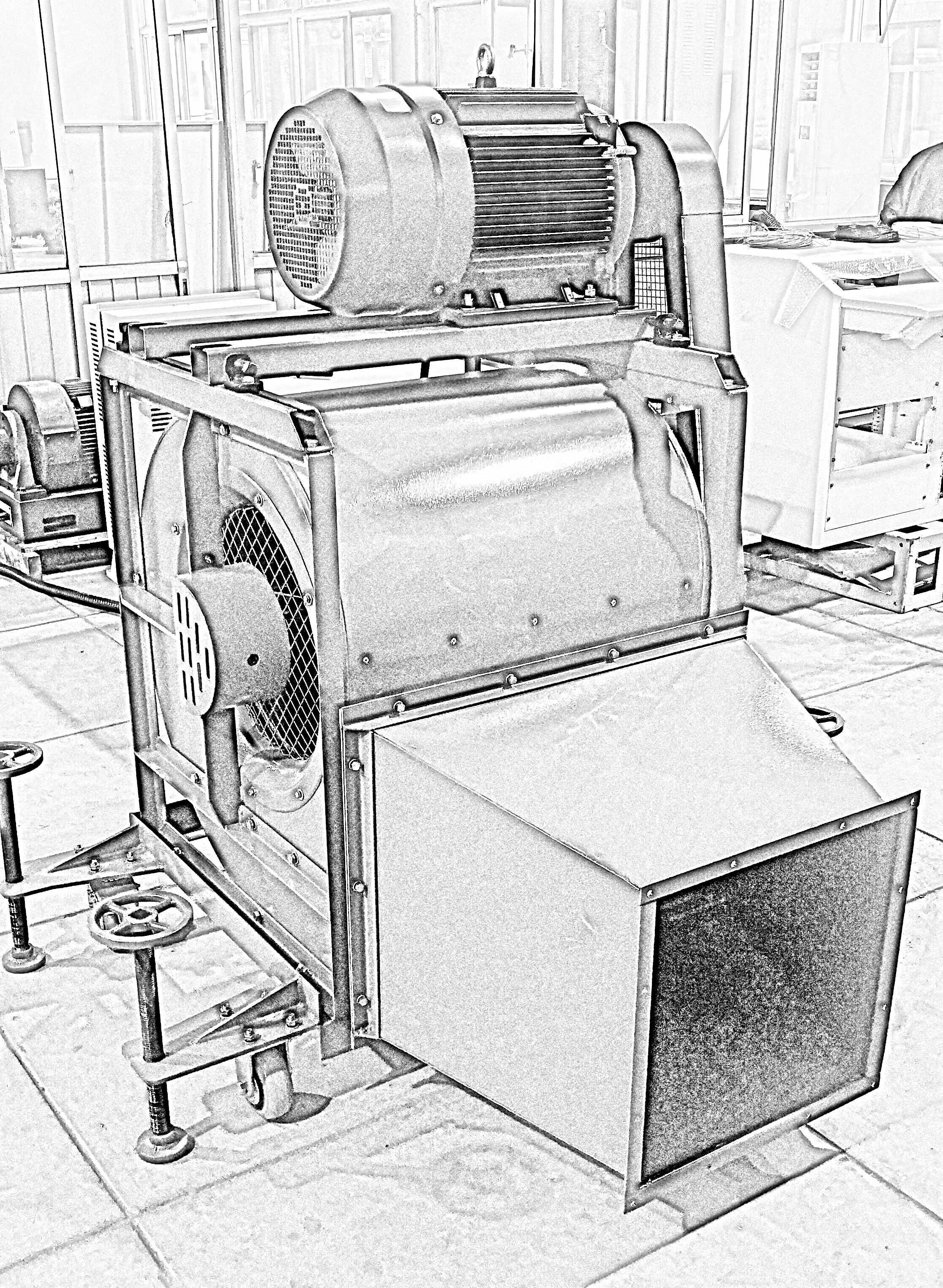
这是冷却风机的系统。
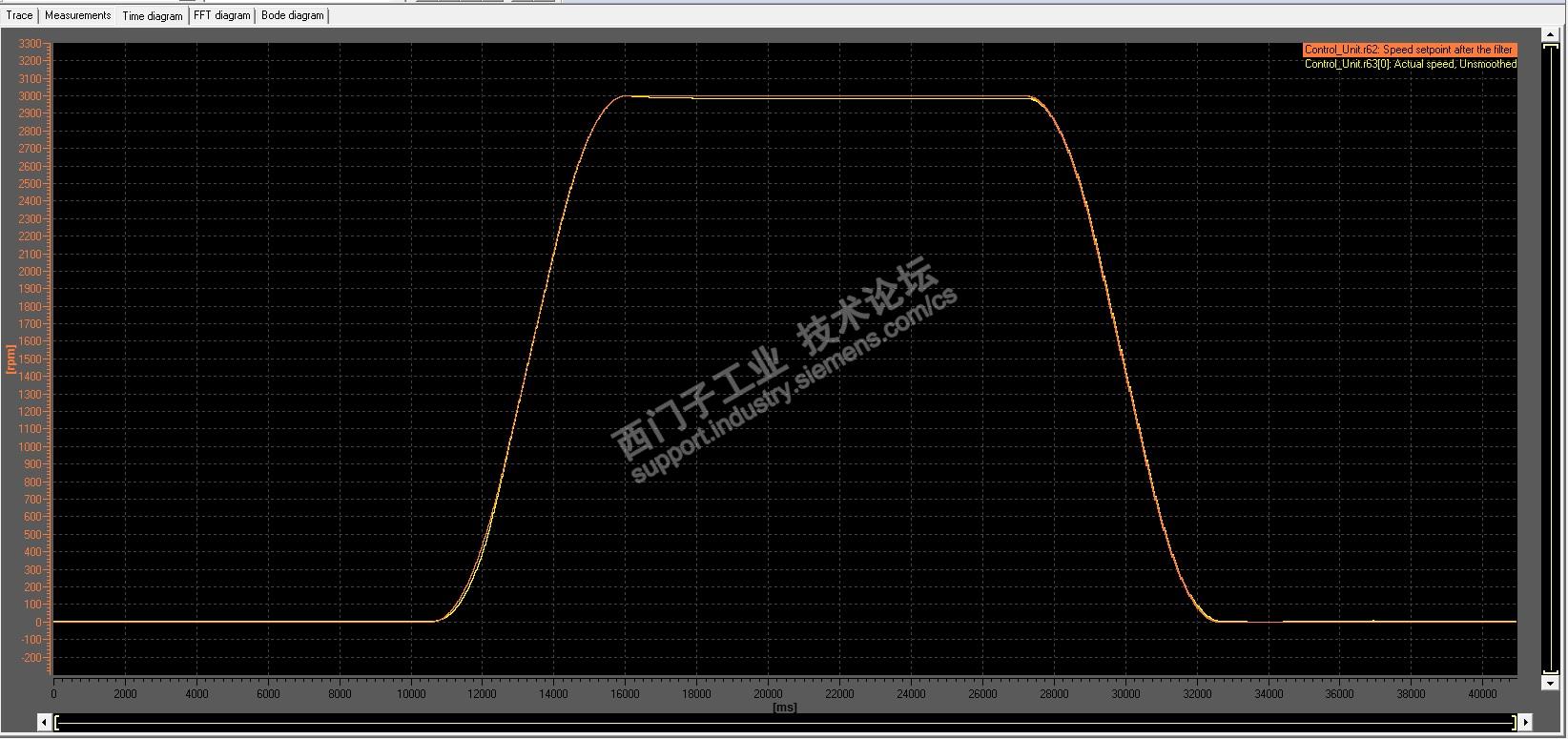
75kW电机的系统在快速调试完成以后,通过录制转速设定值与实际值的曲线,发现不理想呀。
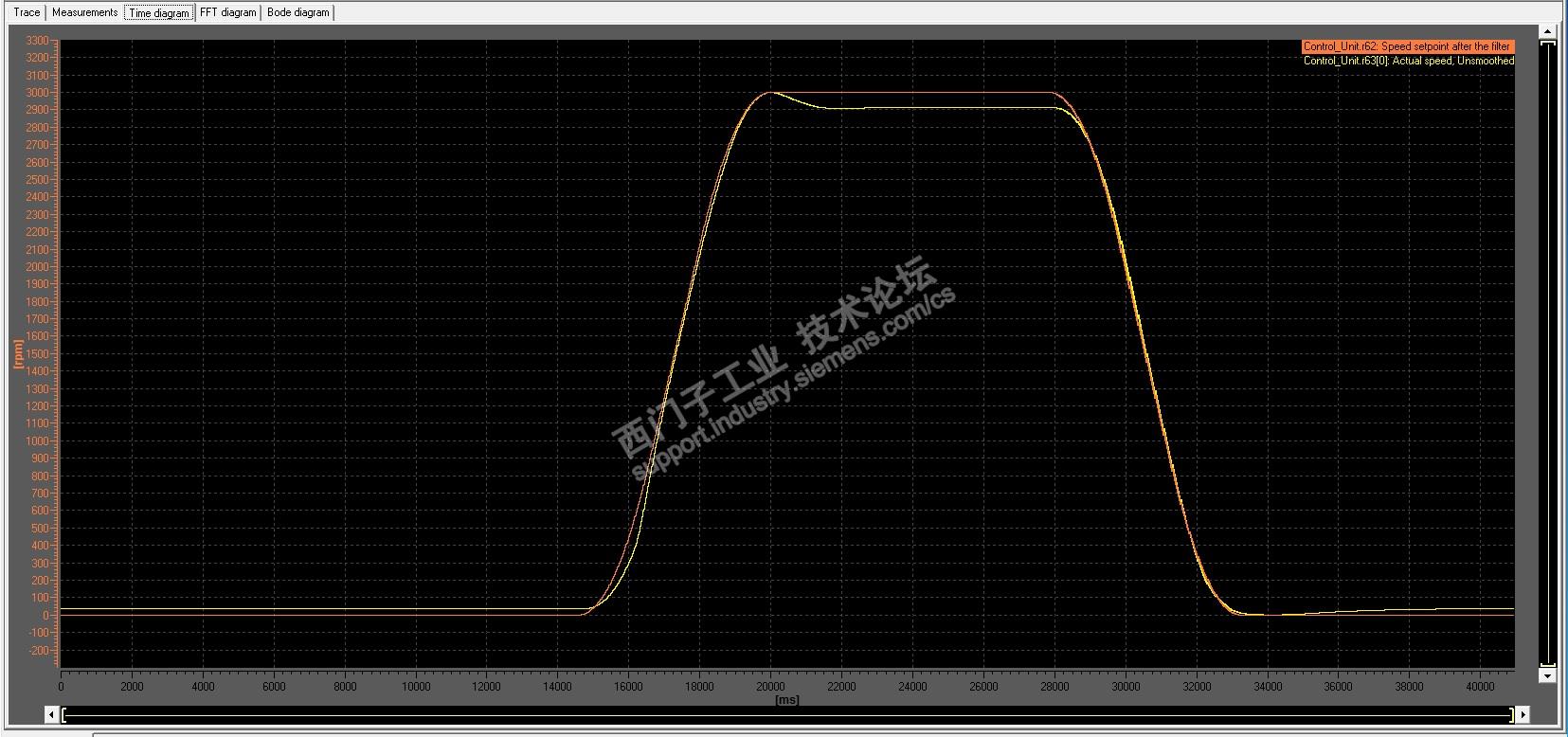
由图示可知,起步状态,转速实际值跟不上设定值,且加速结束,实际值有超调。
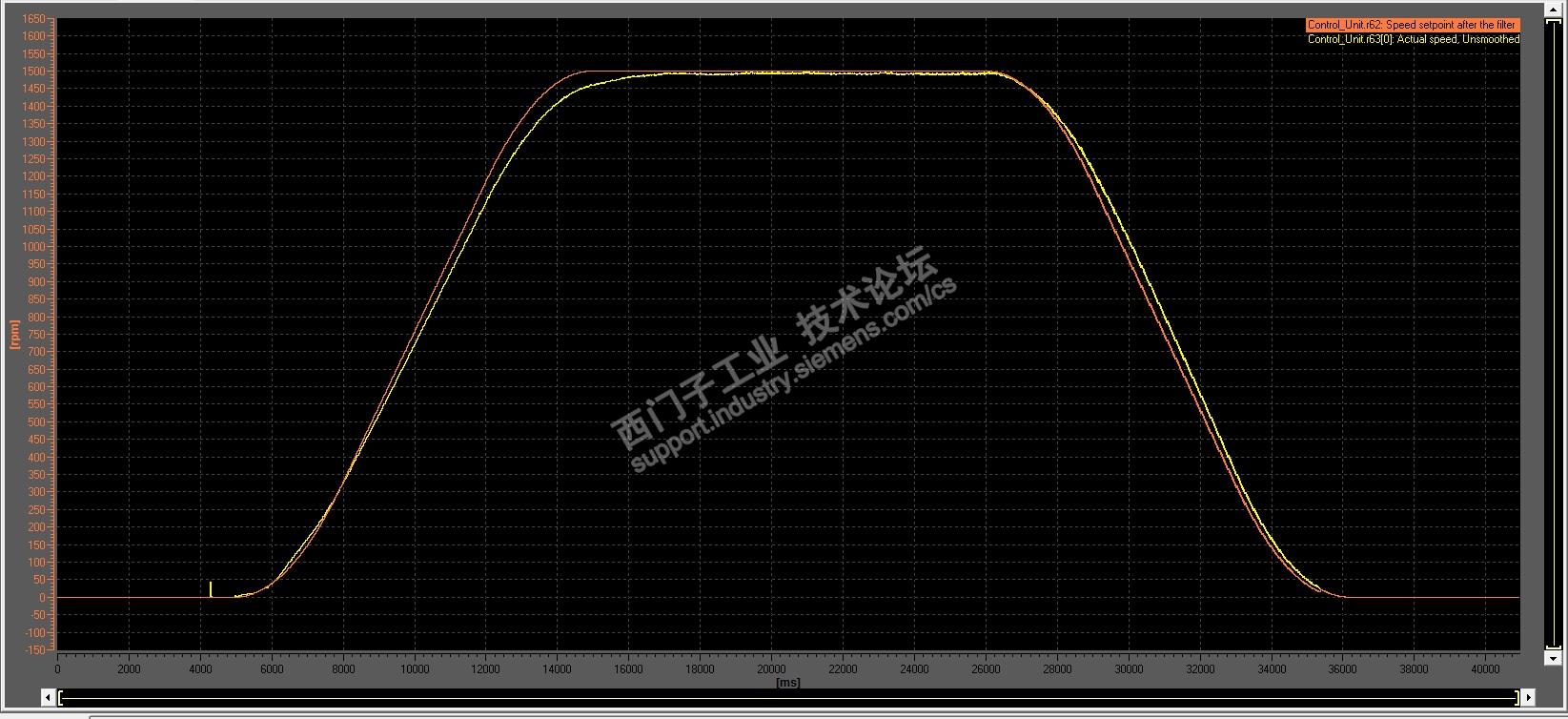
修改惯性前馈补偿参数和PI参数,再录波如下:
完全符合要求了。所以。快速调试完成以后,通过trace的方法,验证系统调节特性参数非常必要。手动修改参数非常有效。在这里,速度控制下的惯性补偿参数,很关键哟。
再看G120C的风机控制系统调试。以往,风机控制,因为都是中小功率的风机系统,所以我都是使用变转矩的V/F控制方式。它的问题就是,必须要根据风机实际惯性,设置合适加减速斜波参数。针对此类功率等级的风机,我们一般都要把斜坡时间设置在30s以上,甚至更长。否则,实用中往往会出现风机系统报过电流故障。这次采用的G120C,我尝试一把无编码器的矢量控制风机系统。效果很不错呦。
调试完成以后的风机转速设定值和实际值录波如下:
由上图可见,风机起步时,速度实际值甚至超前设定值,说明补偿有点过头了。随着风机加速的动态过程,风机控制系统属于饱和加速,而跟不上设定值,产生滞后。但并没有问题。属于***大能力的加速过程。风机减速时,实际值明显滞后设定值。这是正常的。因为我的风机系统没有制动功能,此时是***大直流母线电压控制器被激活的状态。
由图示可以看出,风机动态过程不受限于斜坡时间,完全是根据自身能力进行加减速的动态控制。没有过电流报错问题。而且其动态过程比V/F控制要短得多。
